Drone technology Diy drone Computer basics Circuit Diagram I wanted to control my drone from an Arduino because I wanted to take a step into the automation of my drone. There was the option of building a drone and using the Arduino as the Flight Controller, but then I would miss out on all of the advanced features that the more popular firmware, like Betaflight, provides.

As this flight controller is meant to be integrated on the TPU stack, I've worked on the v2 design and on the board shape simultaneously to take into account integration, usability and layout constraints. The result is a board using the standard 30.5×30.5mm mounting pattern, but with several tabs to accomodate some special features: Understanding the Basics of Drone Flight Controllers. Before diving into the build process, it's essential to understand the fundamental components and principles behind a drone flight controller. A flight controller is the brain of a drone, responsible for interpreting sensor data, processing commands, and controlling the motors to achieve

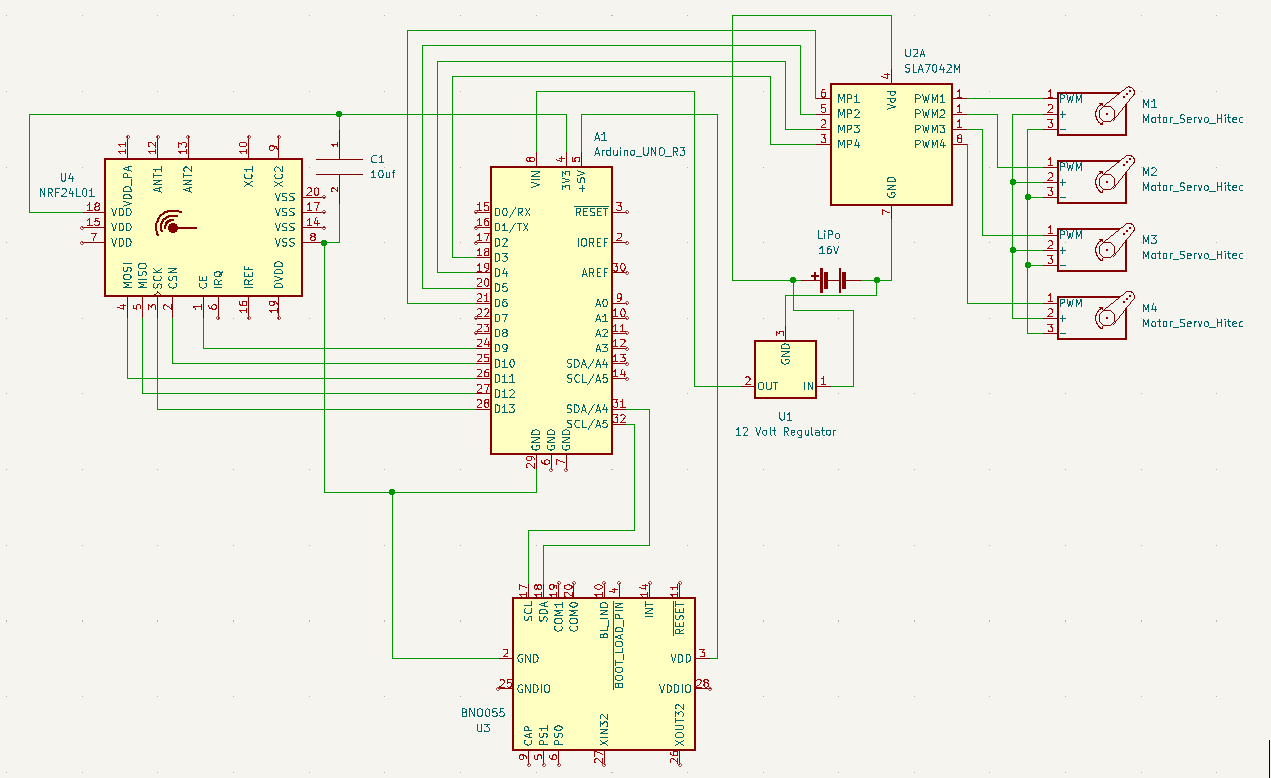
KK2.1.5 Flight Controller Circuit Diagram
# How to Build a Flight Controller using a Microcontroller  and Acc (Accelerometer). The essential components of a drone circuit include a flight controller, which is the brain of the drone that interprets sensor data and sends commands to the motors; the power distribution board (PDB), which distributes power from the battery to the motors and other components; electronic speed controllers (ESCs), which regulate the speed of
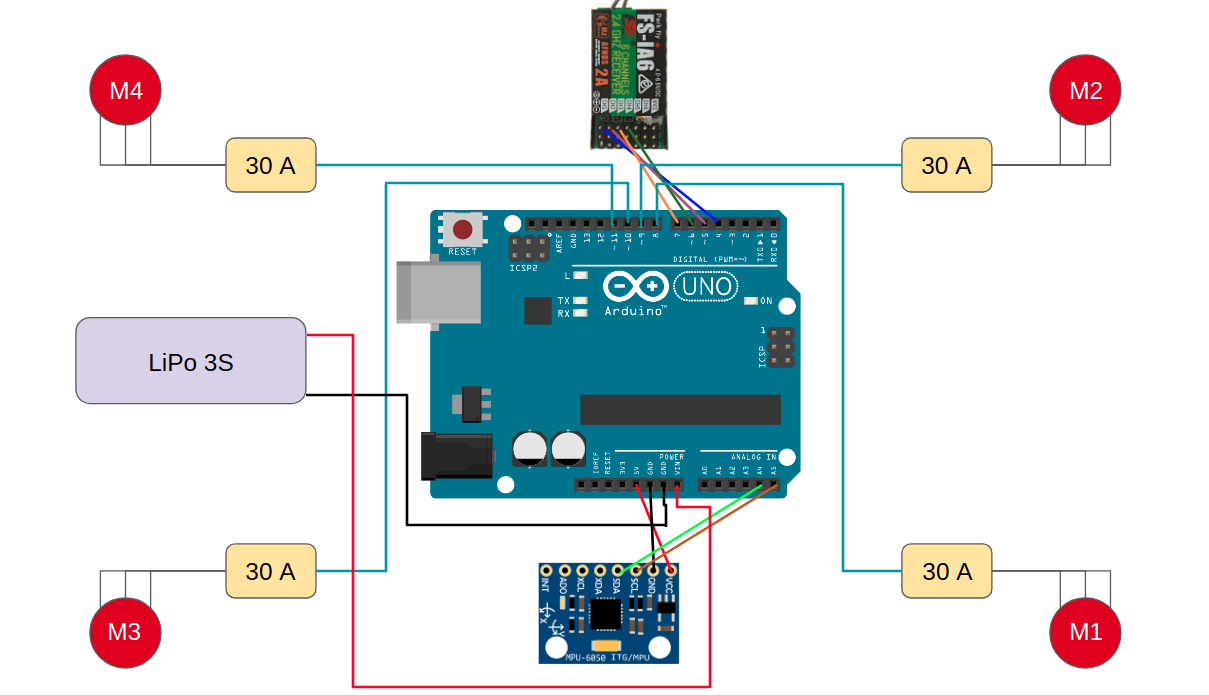
There are often two voltage ranges described in the spec sheet of a flight controller, the first being the voltage input range of the flight controller itself (most operate at 5V nominal), and the second being the voltage input range of the main microprocessor's logic (ex 3.3V or 5V).Since the flight controller is a fairly integrated unit, you really only need to pay attention to the input Once the flight controller is calibrated, the pilot can then start flying the drone. To do this, the pilot will use the throttle channel to increase or decrease the speed of the drone's motors. The pitch channel is used to control the angle of the Drone. Circuit Diagram - ESP8266 Flight Controller Flight controller - This integrated circuit (IC) serves as the brain of the drone, controlling the motors and stabilizing flight. Some options are STM32, Arduino, or Raspberry Pi Pico. Support ICs - May need additional ICs like motor drivers or sensors. Connectors. Battery connector - JST or XT30 are common LiPo battery connectors.